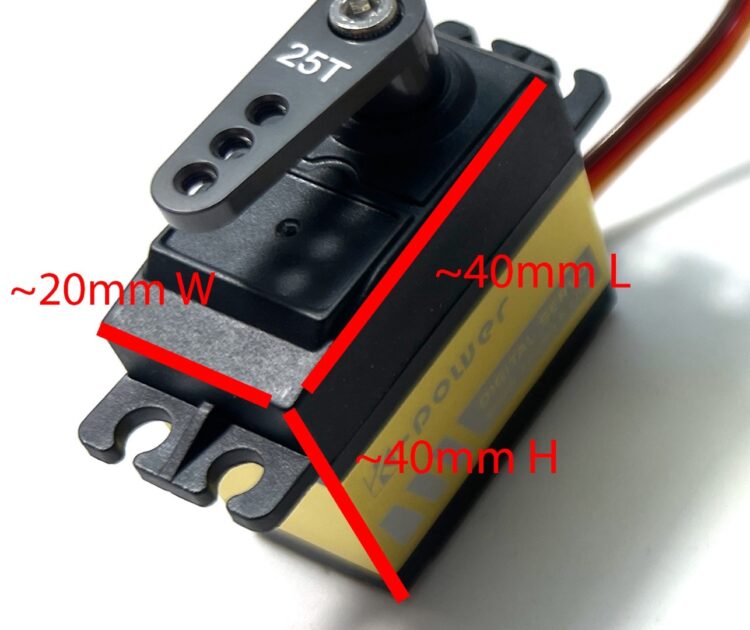
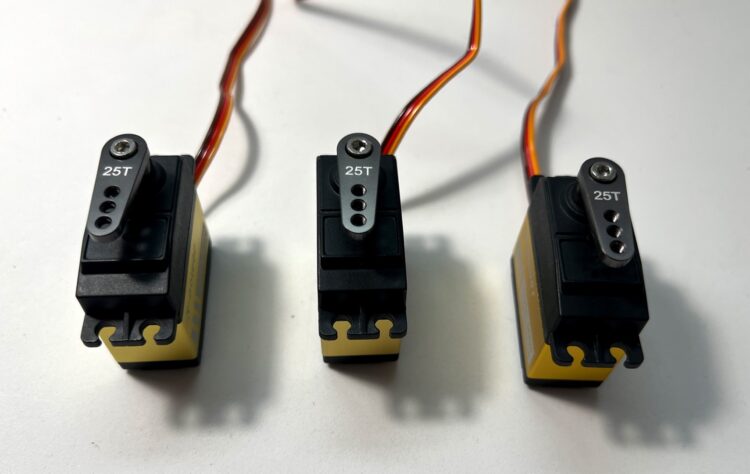
For selecting servos, we aren’t moving anything too heavy here, so you don’t need enormous torque. Just make sure they’re “standard size” servos (Figure G).
The better servo you buy, the smoother movement and quieter sound you should expect, and the longer you can plan for this build to keep working.
Personally, I hate the plastic horns that come with servos; they’re almost impossible to work with. Instead, we’ll use nice metal horns that have easy-to-use, threaded M3 bolt holes (Figure H) at 12mm, 16mm, and 20mm.

These are generic pieces that multiple manufacturers make; if you search Amazon for “metal servo horn” you’ll find a few different brands that look just like this.
The print files are designed with this specific metal horn in mind, but the STEP files should let you change things up if you need to move the mounting holes on the project around. Having threaded mounting holes on the horns is a must!
Make sure each servo is centered before you put the horns on. It’s important that your servos are in a predictable state when at their “home” resting position. On the project page, I’ve included a simple Arduino sketch for centering servos. Upload the ServoCenter.ino sketch onto your microcontroller, and connect power to the servo shield. Then if you put the servo on pin 3, you’ll test if it can move correctly; it should sweep back and forth. When you put the servo on pin 5, it’ll center the servo. Always put the horn on while the servo is centered, ideally with the servo connected to pin 5 with this test sketch running.
For all six servos, attach the horn pointed back in toward the center of the servo (Figure I). I like to use some of the M3 8mm bolts to attach the horn, rather than the screws that come with the servos.
Add the rubber isolator grommets that came with your servos to the servo mounting holes (Figure J). These grommets help adjust for differences in exact servo dimensions between models, as well as dampening vibrations. We’ll skip the metal eyelet inserts; they’re more for the world of RC, and not needed here.
